此章节内容包含连接到 KINGSTAR 前所需的基本 EtherCAT 设定与系统设定。
于启动页面点击「新增专案」后,即开启「连线设定」页面。
连线 / 断线:点击「连线」可将硬体连接到 KINGSTAR 子系统,连线建立后,此按钮将会变为「断线」。
注意:只要设定工具未关闭,就算将子系统与硬体断线,所有设定仍会保留。

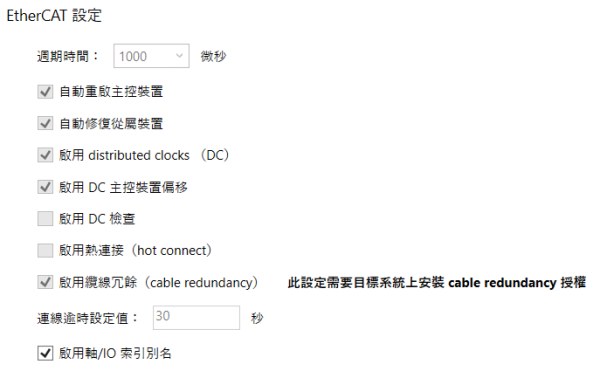
EtherCAT 设定
周期时间:EtherCAT 网路的周期时间,点击下拉选单以选择周期时间,或直接于输入框输入一个值。KINGSTAR 总线 Runtime 套装所支援的最快周期为 1 毫秒(1000 微秒),若需要更快的周期时间,请先取得高速计时器套件。请注意:
自动重启主控装置:若缆线断开,EtherCAT 主站将在缆线接上时自动重启。 自动修复从属装置:若任一从站消失(因替换伺服驱动器、缆线断开、断电或其他原因)或进入 EtherCAT 错误状态,其将自动重启,而非处于错误状态的从站将不受影响并继续正常运作。 启用 distributed clocks (DC):启用或停用分散式时钟同步。 启用 DC 主控装置偏移:决定用来同步在 EtherCAT 网路上的装置之参考时钟,有两种模式:主控装置偏移 (Master Shift) 与总线偏移 (Bus Shift),若勾选,将使用主控装置偏移。
启用 DC 检查:在 KINGSTAR 子系统启动期间启用分散式时钟 (DC) 检查。 启用热连接 (hot connect):在 KINGSTAR 子系统运作时将新硬体新增至 EtherCAT 网路。 启用线缆冗余 (cable redundancy):启用线缆冗余 EtherCAT 的最后一个从站连接到电脑上的另一个网路卡,如此所有的从站在一条缆线故障时仍可通讯。 连接逾时设定值:分配给硬体连接到 KINGSTAR 子系统的时间,若未在给定的时间内建立连接,将出现错误讯息,某些硬体可能需要大于 30 秒的连接时间。 启用轴 I/O 索引别名:此选项仅在「选项」中勾选「支援索引别名」时才会出现。选取此选项可在所有功能中启用轴与 I/O 索引参数的别名索引。启用后,您可以选择在装置清单中依别名顺序显示装置(详情请参阅「依别名顺序显示装置」)。此选项可在 KINGSTAR 连线前或连线后启用或停用。若在连线后变更此设定,旁边会出现「传送」按钮,点选「传送」以套用并储存变更。 |
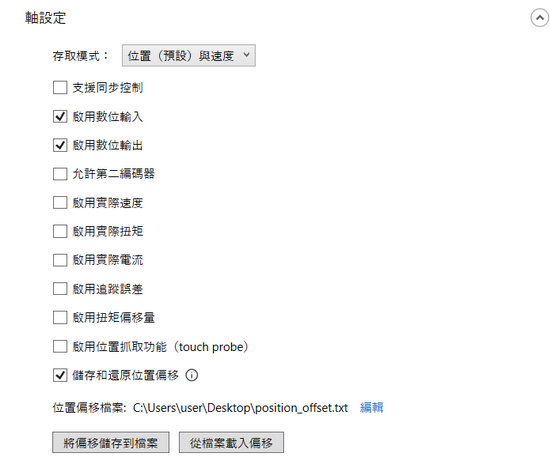
轴设定
存取模式:设定 EtherCAT 驱动器的资料传输模式。更多关于传输模式的资讯请见:概念解说 > 控制模式。
支援同步控制:启用操作模式 (Modes of Operation) 与操作模式显示 (Modes of Operation Display) 物件,以透过 PDO 而不是 SDO 来改变控制模式,此功能可快速变更控制模式(通常为 3 - 5 个周期),并非所有伺服驱动器都支援此功能。 启用数位输入:对所有轴启用数位输入存取,非所有轴皆有数位输入。 启用数位输出:对所有轴启用数位输出存取,非所有轴皆有数位输出。 允许第二编码器:启用轴内部位置的存取。 启用实际速度:将实际速度变数加入 PDO。 启用实际扭矩:将实际扭矩变数加入 PDO。 启用实际电流:将实际电流变数加入 PDO。 启用追踪误差:将跟随误差变数加入 PDO。 启用扭矩偏移量:将扭矩偏移变数加入 PDO。 启用位置抓取功能 (touch probe):将位置抓取功能控制 (TouchProbeControl) 和位置抓取功能状态 (TouchProbeStatus) 变数加入 PDO。 储存和还原位置偏移:勾选此选项以启用专案中的「储存和还原位置偏移」功能。勾选后,介面将显示用于储存与还原所选轴位置偏移的启动按钮(请参考下方启动按钮说明);同时启用各轴设定,可用来指定是否将此功能套用至该轴(请参考储存与还原)。此选项仅在启用「储存和还原位置偏移」功能后才会显示(请参阅〈储存和还原位置偏移〉中的步骤 1)。 注意:若尚未选择「位置偏移量档案」,在勾选此选项时,系统会显示提示,要求您选择或建立一个档案。 勾选「储存和还原位置偏移」选项后,将显示以下启动按钮:
注意:若子系统侦测到位置偏移量档案中储存的资料与专案中储存的资料不符,将显示「资料冲突」提示,您可选择其中一种方式以确保资料的一致性: 使用位置偏移量档案中的资料取代专案中的偏移量。 使用专案中储存的偏移量覆写位置偏移量档案。 |
RTX64 设定
显示即时子系统讯息:显示在 RtxServer 上的即时伺服器之讯息。 |
装置设定
设定欲使用的装置数量,若您有实际装置可连接,可在输入框中输入零;若无实际装置可连接,您可于输入框中输入所需装置数量,若实际装置数量不足于输入装置数量,则会建立虚拟装置补足。 所需轴数:设定要建立于 EtherCAT 网路上的轴数量,若所需数量超过实际轴的数量,系统会建立虚拟轴以补足所需数量。 所需 IO 数:设定要建立于 EtherCAT 网路上的 I/O 模组数量,若所需数量超过实际 I/O 模组的数量,系统会建立虚拟 I/O 以补足所需数量。 选择欲与 KINGSTAR 控制模式使用的轴KINGSTAR 控制模式所支援的轴数依您的授权而定,总数为实际轴与虚拟轴的总和,例如,若购买了支援八轴的 Axis Level 1 套装,您可设定五个实际轴与三个虚拟轴;或四个实际轴与四个虚拟轴,此八个轴可由 KINGSTAR 控制模式控制;而此八轴之外的其他轴可受手动模式 (modeManual) 控制,您需使用自己的运动函式来控制这些轴。 当「所需轴数」中的值超过您的授权所支援的数量,设定工具将请您选择用于KINGSTAR 控制模式的轴。以下范例为支援八轴的授权,因此最多可选择八轴,选定轴后点击 OK 以连接。
|





注意:连线建立后,装置将自动显示在装置清单上。预设情况下,清单上显示的装置将按照它们在 EtherCAT 上的连接顺序依序排列,装置显示的名称即为该装置的索引。欲重新排列装置清单,您可使用别名*功能(WriteAxisAlias 或 WriteIOAlias)。
别名* 若别名功能已启用,而装置显示的顺序并未按照别名顺序排列(仍显示索引名称),请执行以下步骤:
1. 至 C:\Program Files\IntervalZero\KINGSTAR\bin\ksm64Tuning 路径下开启 KsTuning.exe.config 档案,将 ApplyAlias 的值改为 "true"。
2. 使用您的开发工具建立 EtherCAT 连线并为装置设定别名。
3. 开启 KINGSTAR 设定工具并重新连结 KINGSTAR Runtime 以更新别名顺序。请确认步骤 1 中 ApplyAlias 的值已设定完成后再开启 KINGSTAR 设定工具。
注意:设定工具不完全支援别名,以下为已知的限制:
1. 若 ApplyAlias 设为 true,则于设定工具点击连线键将无法正确启动 EtherCAT 连线。
2. 若 设定工具在 ApplyAlias 为 true 时储存专案,则设定工具与 KINGSTAR API 无法使用别名来建立 EtherCAT 连线。
参见